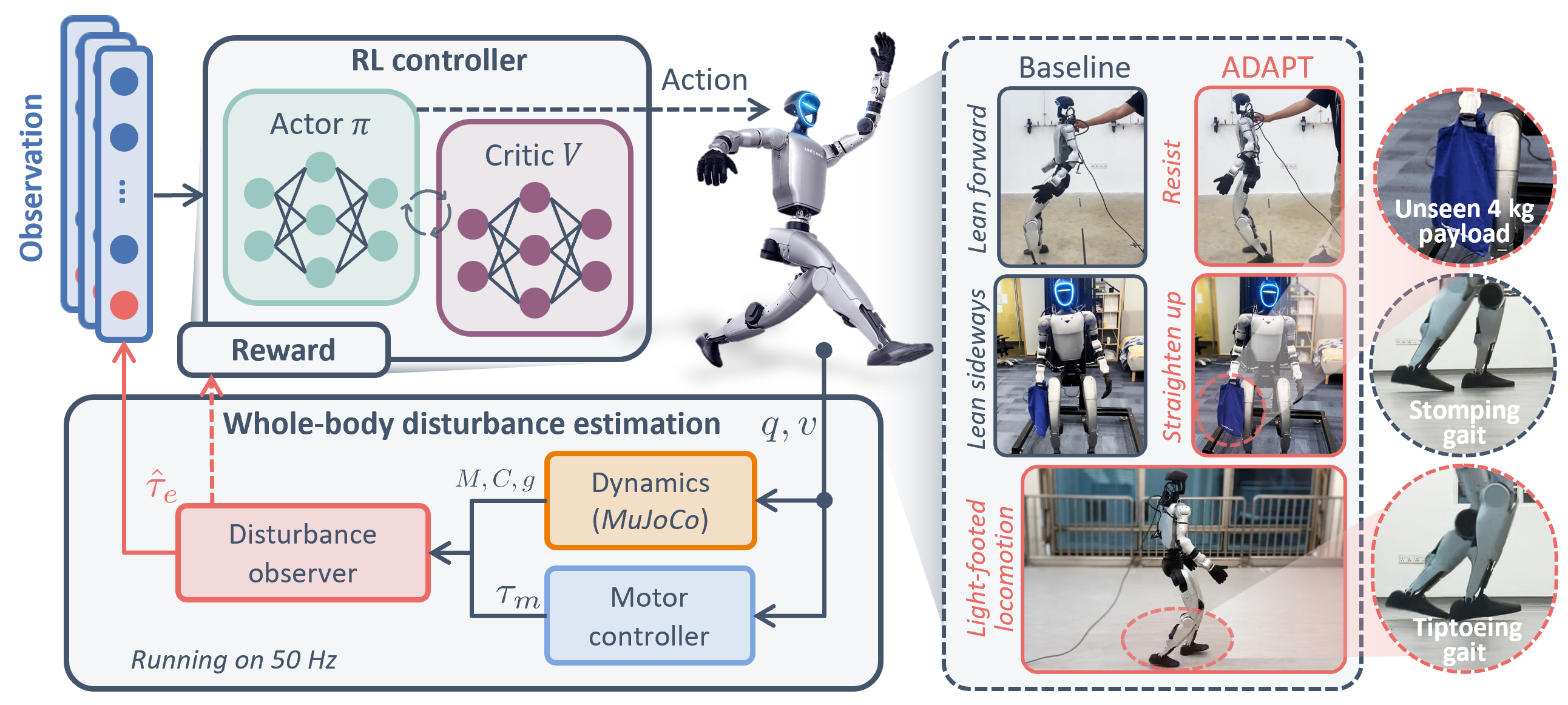
Stance Pulling Test on Hardware
Torso Push
Shoulder Push
Torso Pull
Baseline
ADAPT
Stance pulling test. Baseline is shown in the upper row and ADAPT in the lower row. The robot receives a zero-velocity command while an operator applies external forces to its torso and shoulder. Compared with the proprioception-only baseline, the ADAPT-trained policy shows stronger resistance to the applied forces and adjusts its whole-body posture to counteract the perturbation, indicating improved whole-body robustness during physical interaction.